

El proyecto que presentamos a continuación pretende generar aviso visuales por impactos mecánicos. Sus fundamentos nos permitirán implementar a nuestro robot de capacidad de evaluar terremotos, el oleaje que soporta nuestra embarcación, o simplemente las vibraciones que soportamos cada vez que pasa un maquinaria pesada cerca nuestra.
Para ello vamos a requerir del sensor de choque Keyes KY-002 disponible en el Kit de sensores Keyes 37 en 1, que fundamentalmente monta un sensor mecánico de muelle del que ya estuvimos estudiando en la entrada sensores de muelle.
Su interior básicamente consiste en un muelle basculante, como podemos ver en la imagen que mostramos a continuación

que cuando se monta en el módulo Keyes KY-002 y recibe un impacto mecánico, cierra un circuito de alimentación que es capaz de detectarlo nuestro Arduino

Nota: cómo pueden existir distintos proveedores de este módulo, prestad atención a la identificación del GND(-) y de la señal (S), por si en algún caso fuera diferente. Ante la duda, como sabemos por el esquema de funcionamiento que la señal está conectada a través de una resistencia con la alimentación, nos basta con usar un multímetro para medir la resistencia entre dos pines, y si da infinito (circuito abierto) es que uno de los pines es el GND y si nos da el valor de la resistencia de pull-up que viene montada, es que estamos midiendo los pines de alimentación y señal.

Para su construcción necesitaremos los siguientes elementos:
Para ello vamos a requerir del sensor de choque Keyes KY-002 disponible en el Kit de sensores Keyes 37 en 1, que fundamentalmente monta un sensor mecánico de muelle del que ya estuvimos estudiando en la entrada sensores de muelle.
Su interior básicamente consiste en un muelle basculante, como podemos ver en la imagen que mostramos a continuación

que cuando se monta en el módulo Keyes KY-002 y recibe un impacto mecánico, cierra un circuito de alimentación que es capaz de detectarlo nuestro Arduino

Nota: cómo pueden existir distintos proveedores de este módulo, prestad atención a la identificación del GND(-) y de la señal (S), por si en algún caso fuera diferente. Ante la duda, como sabemos por el esquema de funcionamiento que la señal está conectada a través de una resistencia con la alimentación, nos basta con usar un multímetro para medir la resistencia entre dos pines, y si da infinito (circuito abierto) es que uno de los pines es el GND y si nos da el valor de la resistencia de pull-up que viene montada, es que estamos midiendo los pines de alimentación y señal.

Para su construcción necesitaremos los siguientes elementos:
REFERENCIA
|
CANTIDAD
|
FOTO
|
Sensor de choque | 1 |  |
Protoboard | 1 |  |
Cables colores | 3 |  |
Arduino | 1 |  |
El funcionamiento de un LED, de las resistencias de protección y del los sensores de muelle, lo vimos en entradas anteriores, y el programa está comentado para permitirnos entender las instrucciones que le estamos dando a nuestro microcontrolador.
Primero definiremos un pin donde vamos a enclavar el aviso visual, nuestro LED, y el pin desde donde vamos a monitorizar nuestro detector de choque. Esto lo podemos hacer bien usando variables del tipo entero o bien con la directiva #define (que ahorra memoria en caso de que nuestro sketch muy complejo). En este caso usaremos el pin 13, de nuestra placa que ya monta su propio LED.
Y también definiremos la variable que vamos a usar, para registrar si detectamos vibración o no (en nuestro caso AlarmaChoque).
Luego tendremos que configurar el setup de nuestro proyecto, que en este caso se limitará a definir si los pines que vamos a usar son de entrada o salida. En este ejemplo, el LED de aviso, es un output y como el sensor de muelle nos manda una señal, este pin será un input (una entrada).
A partir de aquí monitorizaremos la variable de detección de choque y si detecta una vibración hará que se encienda nuestro LED, y si no permanecerá apagado.
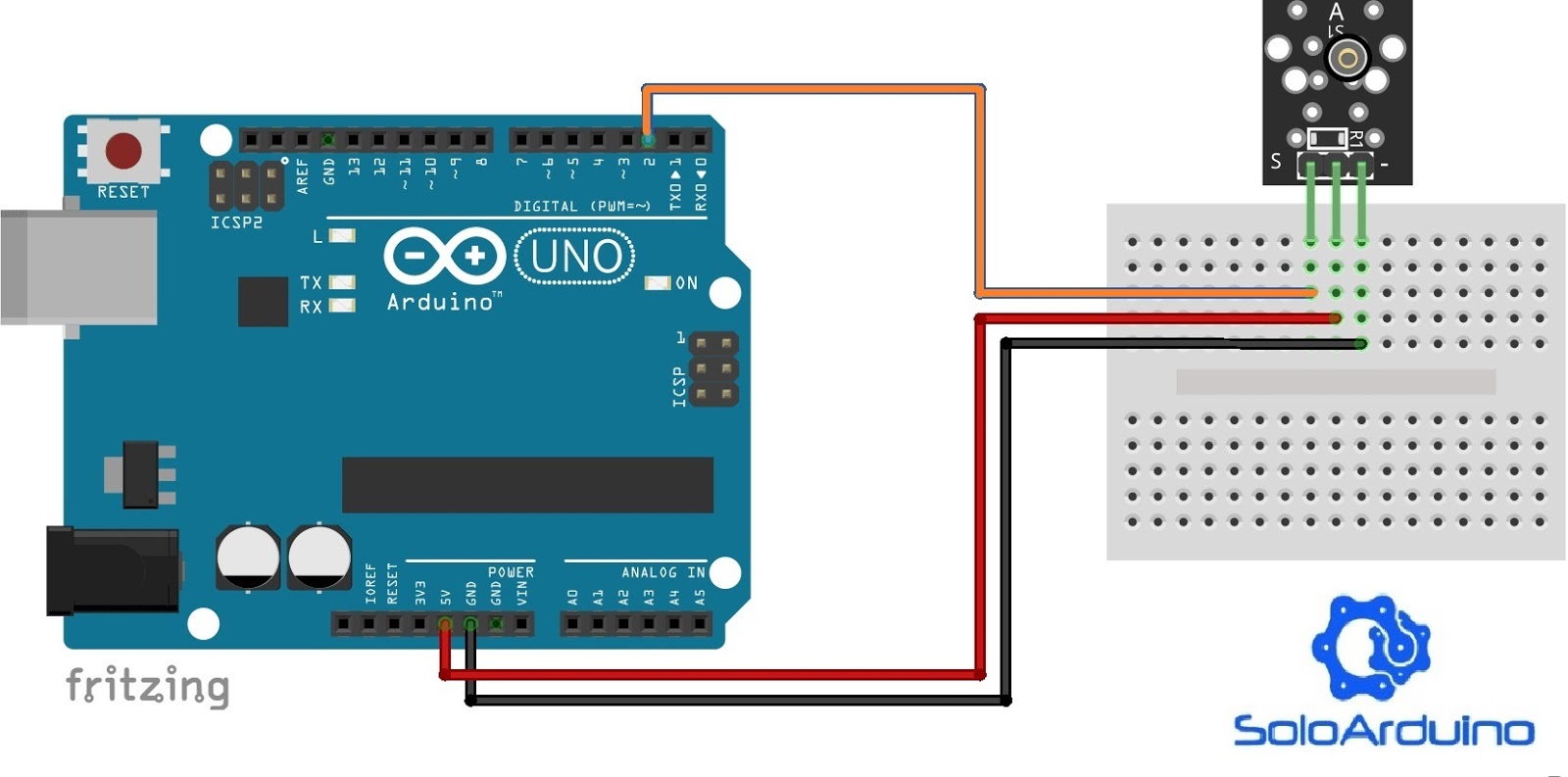
DIAGRAMA DE CONEXIÓN
FUNCIONAMIENTO
Primero definiremos un pin donde vamos a enclavar el aviso visual, nuestro LED, y el pin desde donde vamos a monitorizar nuestro detector de choque. Esto lo podemos hacer bien usando variables del tipo entero o bien con la directiva #define (que ahorra memoria en caso de que nuestro sketch muy complejo). En este caso usaremos el pin 13, de nuestra placa que ya monta su propio LED.
Y también definiremos la variable que vamos a usar, para registrar si detectamos vibración o no (en nuestro caso AlarmaChoque).
Luego tendremos que configurar el setup de nuestro proyecto, que en este caso se limitará a definir si los pines que vamos a usar son de entrada o salida. En este ejemplo, el LED de aviso, es un output y como el sensor de muelle nos manda una señal, este pin será un input (una entrada).
A partir de aquí monitorizaremos la variable de detección de choque y si detecta una vibración hará que se encienda nuestro LED, y si no permanecerá apagado.
Si queréis descargaros el sketch y usarlo directamente en vuestra placa, el fichero os lo dejo aquí, aunque es mejor que intentemos siempre copiarlo a mano, de este modo nos vamos familiarizando con las estructuras de programación, sus funciones y los modos más comunes de error que cometeremos a medida que vayamos desarrollando programas más complejos.
Y ya sabéis, si tenéis alguna sugerencia de mejora o duda, no tenéis más que mandarnos un correo a

e intentaremos responder a vuestra pregunta lo antes que podamos.
No hay comentarios:
Publicar un comentario